





Grundlegende Informationen.
Modell Nr.
FSD-300
Standard
Standard
Zustand
New
Farbe
Blau
Nettogewicht
215kg
Bruttogewicht
245kg
Stellfläche
3000*850*3000mm
Transportpaket
One Piece/Wooden Carton
Spezifikation
3000*850*3000mm
Warenzeichen
ZHZY
Herkunft
Zhuhai
HS-Code
9031900090
Produktionskapazität
500pieces/Year
Produktbeschreibung
Fostar war Eagle-Serie
ZHZF-300A Split intelligente automatische Abstandstaster Serie 3D Allrad Positionierung Instrument für Fahrzeuge
Präzise Positionierung
Führende Technologie/präzise Messung/einfache Bedienung/vollständige Führung

Split-Typ ist intelligente Hubsäule separat in der Meldestelle (andere Funktionen und mobile gleich. Einfach anders installieren) ZHZF-300A Split intelligente automatische Abstandstaster Serie 3D Allrad Positionierung Instrument für Fahrzeuge
Präzise Positionierung
Führende Technologie/präzise Messung/einfache Bedienung/vollständige Führung

------------------------------------------------------------------
Informationen zu Handelsgütern
Produktname: Split intelligente automatische Abstandstacer Serie 3D vier-Rad-Positionierungsinstrument für Fahrzeuge
Markenname: Fostar Eagle
Modellnummer: ZHZF-300A
Nettogewicht: 265KG, Bruttogewicht: 295kg
Wohnfläche: 3000*850*3000mm
Informationen zu Handelsgütern
Produktname: Split intelligente automatische Abstandstacer Serie 3D vier-Rad-Positionierungsinstrument für Fahrzeuge
Markenname: Fostar Eagle
Modellnummer: ZHZF-300A
Nettogewicht: 265KG, Bruttogewicht: 295kg
Wohnfläche: 3000*850*3000mm

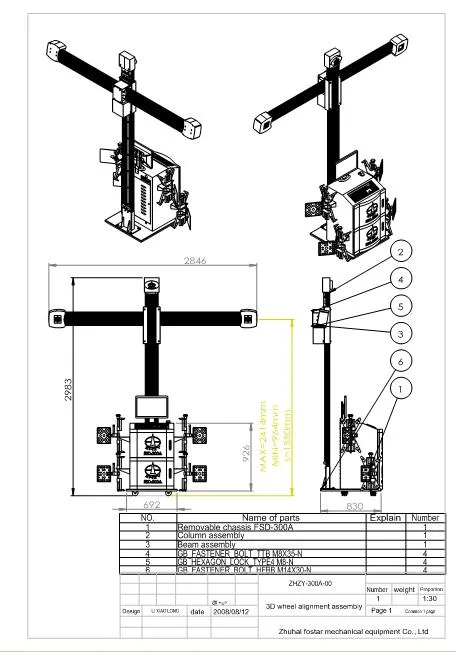
Produktstruktur
- Das Chassis ist aus Kaltplatte Q235 Platte Gold
- Die Säule nimmt Stahlstruktur zweisektion quadratische Pass-Kombinationsstruktur an, und der Abstand zwischen der Säule und der Mitte des Vorderrads des Fahrzeugs (Mitte der Eckplatte der Hubmaschine) ist 1,6-2,8 Meter.
- Die Grundplatte Goldstück, Material Q235. Mit dem Vierkantrohr zur unteren Säule geschweißt, werden der obere Vierkantrohr und das Vierkantrohr der fünf Vierkantsäule eingesetzt und verbunden, und die Schrauben werden von vier Seiten verbunden und verriegelt.
- Die Verbindungshalterung für die Säule besteht aus einer Kombination aus Goldplatte und Balken und Säule.
- Computer mit Win7-64-Bit-Betriebssystem, Dual-Screen-Display (32, 18,5 ") Installationsumgebung Temperatur: -10-+50ºC, relative Luftfeuchtigkeit ≤85%
 Anzeigegenauigkeit: 0,01 1/´ 0,1mm/0,1inch/, zweisprachige chinesische und englische Version. Das Ziel ist auf der Rückseite markiert, um die vordere, hintere, linke und rechte Ausrichtung zu unterscheiden.
Anzeigegenauigkeit: 0,01 1/´ 0,1mm/0,1inch/, zweisprachige chinesische und englische Version. Das Ziel ist auf der Rückseite markiert, um die vordere, hintere, linke und rechte Ausrichtung zu unterscheiden.






 Produktvorteil
Produktvorteil - Höhere Präzision, leistungsstärker
- Die Genauigkeit der Ausrüstung kann 0,01 Grad 0,1mm erreichen
- Einfach zu realisieren, die vollständige Satz aus, um Ihnen Laser Locator kann nicht viele Funktionen zu vervollständigen.
------------------------------------------------------------------
Einfache Bedienung (mit detaillierten Anweisungen vor der Lieferung)
Seine Messung wird nicht durch die Ebenheit der Hebebühne beeinflusst, die Körperneigung diagonal wird seine Genauigkeit nicht beeinflusst. Alle Parameter zur Positionierung der Allradfahrzeuge können nur durch Drücken eines Wagens oder durch Rollen eines Rades ohne regelmäßige Kalibrierung gemessen werden und können nach Ihrem Willen verwendet werden
Feste intelligente vollautomatische Verfolgung 3D Automobil-Allrad-Aligner
- Betriebssystem win64 Bit
- Vollautomatischer Hubmechanismus für die Spurführung, kein manueller Eingriff erforderlich.
- Positionierung der Spezialstation, genaue Erkennungsdaten, schnelle Erkennungsgeschwindigkeit.
- Die Messplattform muss nicht horizontal sein, sondern nur das Ziel befindet sich im sichtbaren Bereich der Kamera.
- Dynamische Maschinentechnologie, dynamische Echtzeitüberwachung von Fahrzeugdaten.
- Kurze Strecke des Wagens, Micro-Distanz-Cart-Technologie, keine Notwendigkeit, auf halbem Weg zu stoppen.
- Radstand, Radstand Differenz, Radstand, Radstand Differenz, Körpergröße Erkennung.
- Die Echtzeitanzeige der Kingpin-Daten ist für die Aufhängung bequem.
------------------------------------------------------------------
Niedrige Ausfallrate
- Da sich keine elektronischen Komponenten auf dem Ziel befinden, keine Batterien erforderlich sind, keine Datenübertragung erforderlich ist, dient es nur als Reflexion.
- Der Hauptkoffer besteht aus Blech mit kleinen Gehäusenrollrädern darunter.
- Der Balken ist aus Aluminiumlegierung gefertigt und hat starke Anti - Korrosion und Anti - Druck Fähigkeit.
- Die Maschine nutzt Tempomat-Führung und Positionierungstechnologie: Wenn das Reflexionszielbild nicht im Aufnahmebereich der Kamera ist, weist der Computer den Bewegungsmechanismus des Querhubs an, das Ziel schnell zu sperren. Wenn das Ziel gefunden wird, ist das Anhalten des Aufzugs die beste Position. Der Einsatz dieser Technologie: Sparen Sie Zeit, wenn das Fahrzeug auf dem Aufzug, in einer niedrigeren Position, der Strahl ist in einer hohen, ohne manuelle Bedienung, die Hubmaschine Positionierung in einer optimalen Schiebeposition.

- Die dynamische Körperkoordinate-Computing-Technologie wird übernommen
- Echtzeitberechnung der Mittelraumposition von vier Rädern, und auf dieser Basis die dreidimensionalen Körperkoordinaten OXYZ,OXY für die horizontale Ebene, Y-Achse und vertikale Basis, die Vorder- und Hinterachse des Fahrzeugs in der dynamischen Einrichtung des Koordinatensystems Zerlegung zu ermitteln, Echtzeit-Kompensation für den unebenen Hub, Neigung diagonal verursacht durch die Positionierungswinkelabweichung. Die Rolle der dynamischen Karosserieberechnungstechnologie: Der Positionierungswinkel wird nicht durch die Unebenheit und Neigung des Lifters beeinflusst und wird nicht durch die Länge des Radstandes und die Größe des Radstandes beeinflusst.
- Micro-distance Cart Technologie: Im Allgemeinen muss der 3D Allrad Locator (einschließlich Ausland) für eine gewisse Zeit anhalten, um den Wagen nach hinten zu schieben. Im Algorithmus werden die Anfangsposition und die Anschlagposition für die Berechnung ausgewählt. Wenn der Abstand 17-23cm beträgt, ist das Distanzmesser kurz und die Prüfgenauigkeit kann nicht garantiert werden. Der Abstand des Wagens kann auf etwa 10cm verkürzt werden, und die höhere Genauigkeit des haltenden Wagens kann erreicht werden. Die Rolle der Makrokarren-Technologie: Arbeitsparend, zeitsparend und schnell, nicht beeinflusst von der Winkelplatte und Hubmaschinenhöhe, sind Messdaten stabiler.
- Diese Maschine nutzt eine volldirektionale automatische Tracking-Technologie: Es ist eine Technologie, die die Hebevorrichtung automatisch verfolgen kann, ob sie in der Zielüberwachung (oder Kamerawartung) ist Oder im Prozess der Prüfung und Anpassung durch die genaue Berechnung der Zielbildposition durch den Computer ohne Fernbedienung und ohne die Steuerung des Mobiltelefons.
- Funktion der volldirektionalen automatischen Tracking-Technologie: Spart Zeit. Wenn der Hebezeug nach dem Test in einer niedrigeren Position angehoben werden muss, um den Positionierungswinkel einzustellen, muss der Hebezeug nicht auf die Bedienschnittstelle für die Zielüberwachung (oder Kamerawartung) umgeschaltet werden. Drücken Sie einfach auf das Hubfahrzeug, um den Positionierungswinkel einzustellen. Die Positionierungsgenauigkeit ist höher, da die Kamera und das Reflexionsziel immer die am besten geeignete Position beibehalten, was die Bildqualität verbessern und die Positionierungsgenauigkeit gewährleisten kann.
Die Kamera reagiert schnell
Niedrige Temperatur Leistung ist gut, kann um minus 30 Grad Celsius arbeiten, Reaktionszeit ist nur 3S, Kamerageschwindigkeit von 30 Fotos pro Sekunde
 Zertifizierung nach ISO-Qualitätssystem und CE-Zertifizierung bestanden
Zertifizierung nach ISO-Qualitätssystem und CE-Zertifizierung bestanden ------------------------------------------------------------------
Aussehen und Farbe des Produkts sind optional
------------------------------------------------------------------
Technische Parameter
Anzeigegenauigkeit und Messgenauigkeit ±0,01/0,01mm,
| Element | Präzision | Messbereich | Maximaler Messbereich |
| Sturzwinkel | ±0,015 | ±0,01 | ±30 |
| Hinterer Winkel | ±0,025 | ±0,01 | ±30 |
| Achsschenkelbolzen, Winkel nach innen | ±0,025 | ±0,01 | ±15 |
| Achsschenkelbolzen, Winkel nach innen | ±0,025 | ±0,01 | ±20 |
| Antriebswinkel Hinterrad | ±0,015 | ±0,01 | ±6 |
| Maximaler Lenkwinkel | ±0,015 | ±0,01 | ±30 |
| Rückzugswinkel | ±0,015 | ±0,01 | ±6 |
| Radabstand | ±0,25cm | ±0,01 | 3000mm |
| Radstand | ±0,25cm | ±0,01 | 8000mm |
| Diagonale | ±2mm | ±0,3cm | 12000mm |
| Radradius | ±2mm | ±0,3cm | 700mm |
Standardzubehör
Aluminium-Legierung Strahl * 1, Spalte * 1, Aluminium-Legierung Eckplatte * 2, 4 * vier jig. Ausrichtung Befestigungswinkel *1 . Anschlag Vorder- und Hinterrad *4. Rechner-Host *1 . Monitor Standard 18,5 Zoll, optional (24 Zoll) Tastatur *1, 1 * Maus, kompletter Kabelbaum *1 Set, Strahlanschlusshalterung *1 Stück, Säulenkappe *1, 4 * Aufhänger
Die folgende Abbildung zeigt die Hostkomponenten


 Manuell
Manuell -
- Einführung von Strukturprodukten
-
- Der Hauptzweck der Maschine
3. Erfassungsbereich
11-24 Zoll Reifen werden für Reifenwagen montiert.
4. Hauptmerkmale der Prüfgeräte
3D Allrad-Positioniergerät ist die Abkürzung für 3D digital image Allrad-Positioniergerät. Es hat die Eigenschaften von hoher Präzision, leistungsstark, einfach und bequem zu bedienen. Die Erkennungssoftware dieses Produkts hat das Softwaretechnologie-Patent in China. Die Kamera bewegt den Bewegungsweg der vier Räder mit einer Verarbeitungsgeschwindigkeit von 30 Fotos pro Sekunde durch den Computer. Nach der Verarbeitung der Computersoftware werden die realen Allradpositionierungsparameter des Fahrzeugs exakt berechnet und die Allradpositionierungsdaten werden vom Display angezeigt, um dem Reparaturwerkmann Referenz zu geben.









